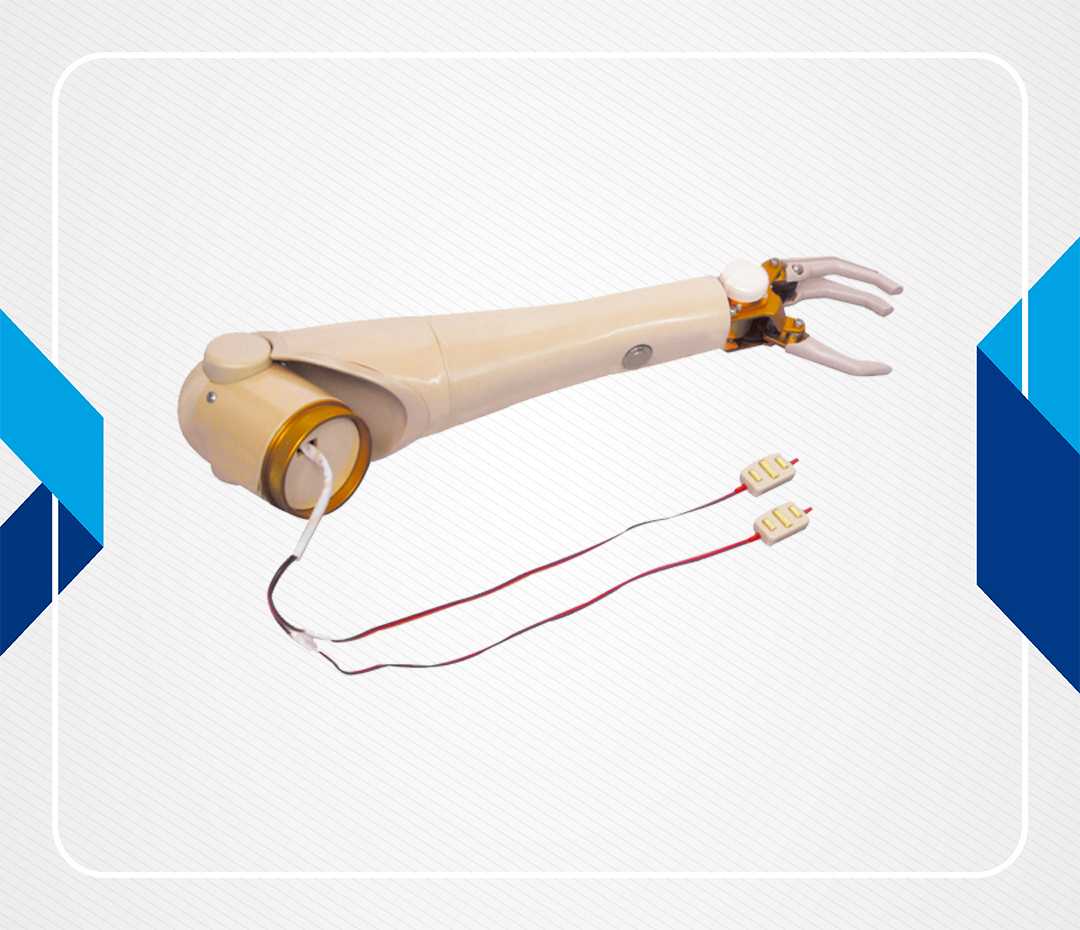
JB-SJS22-1 Myoelectric upper arm prostheses with two degrees of freedom for forearm
Actions of hand and elbow are controlled by myoelectricity.
Wrist joint simulation for elliptic, arm cylinder first half can be passive rotation
Passiveschangeoverbsw/tjchlisoaddednintcaseoofsimyoelectricity switchafailures.
passively.
Upper arm can rotate passively and self-lock at any position

肌电控制手、肘动作
腕关节为仿真椭圆型,臂筒前半部分可被动旋转
如果肌电不能切换,可增加被动开关切换
上臂可被动旋转
臂筒采用环保材料,一次成型全封闭控制线路,内置电池
抗电磁干扰(如手机等)
可采用新一代B型手头配置
适用于上臂肩关节离断,上臂中、短残肢
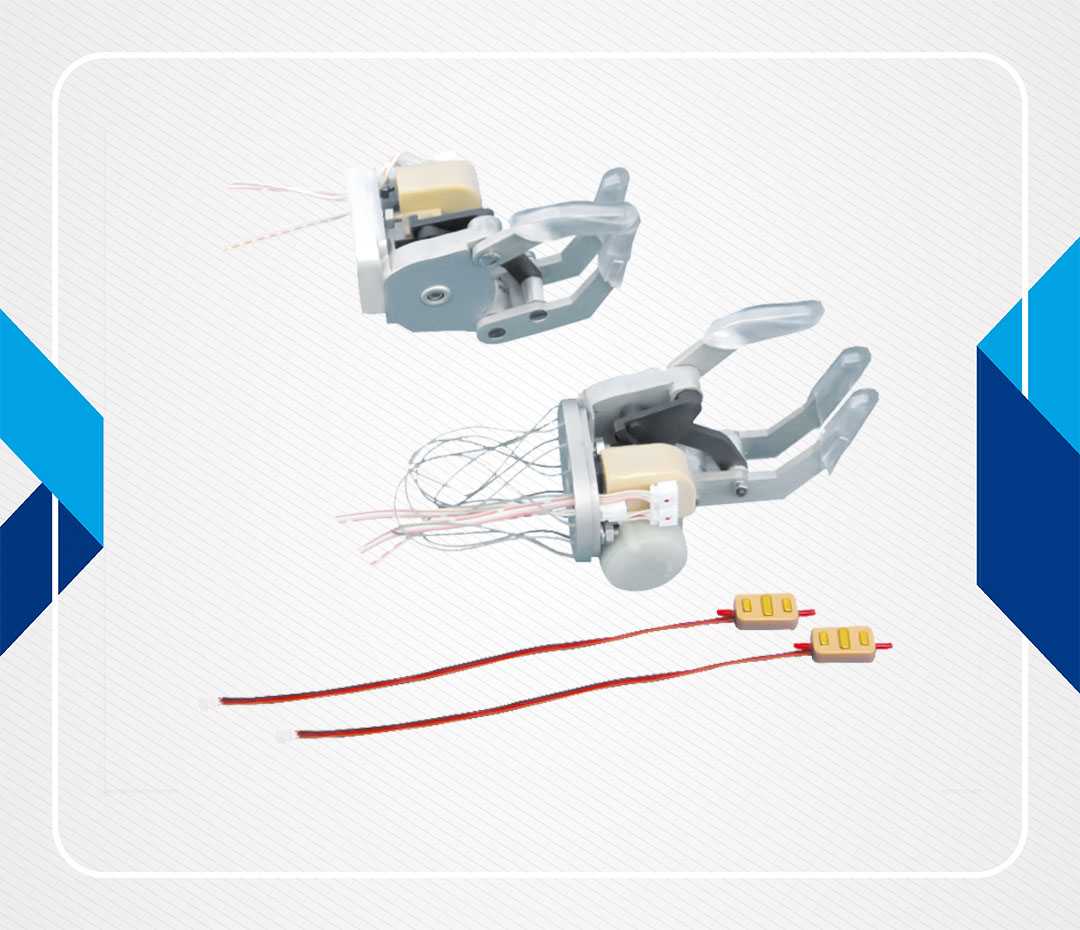
JB-SJQ 16 Myoelectric arm prostheses with one degree of freedom for forearm(half palm)
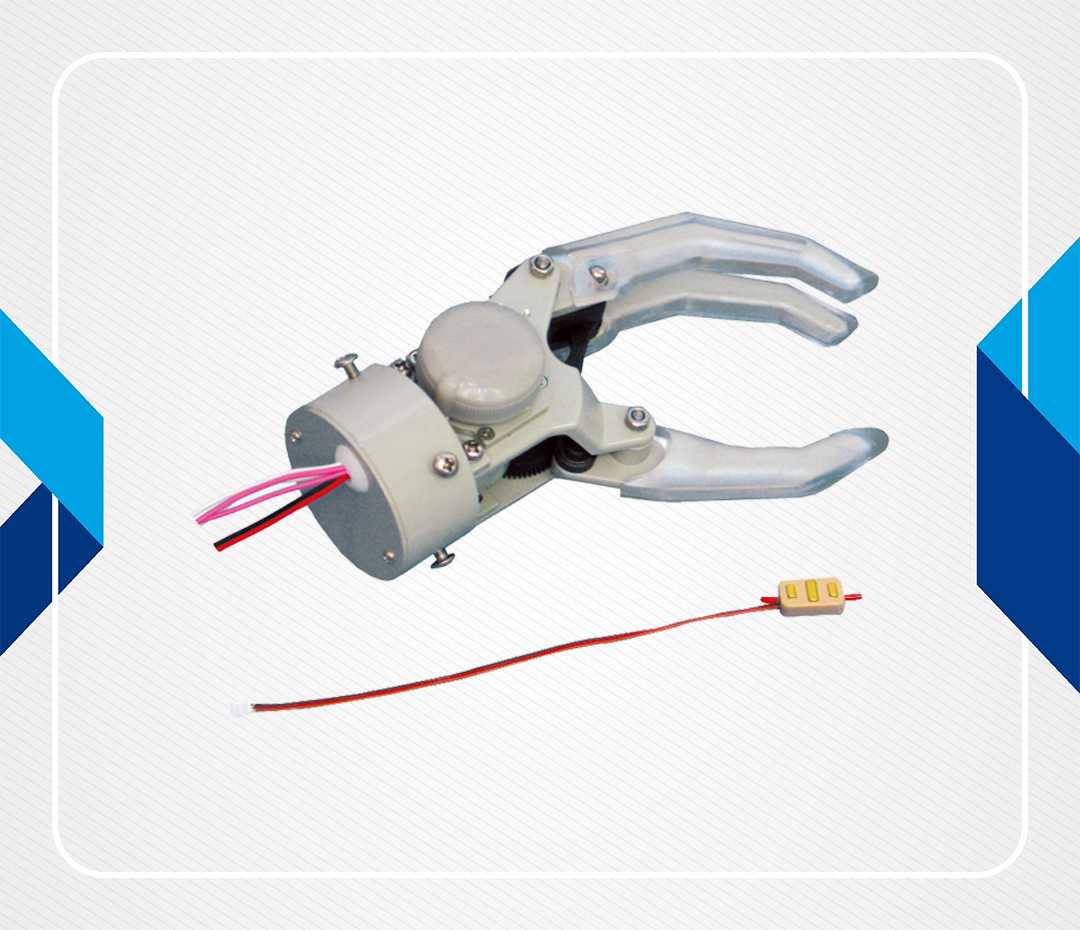
JB-SJQ 11 Myoelectric arm prostheses with one degree of freedom and single channel (single electrode)
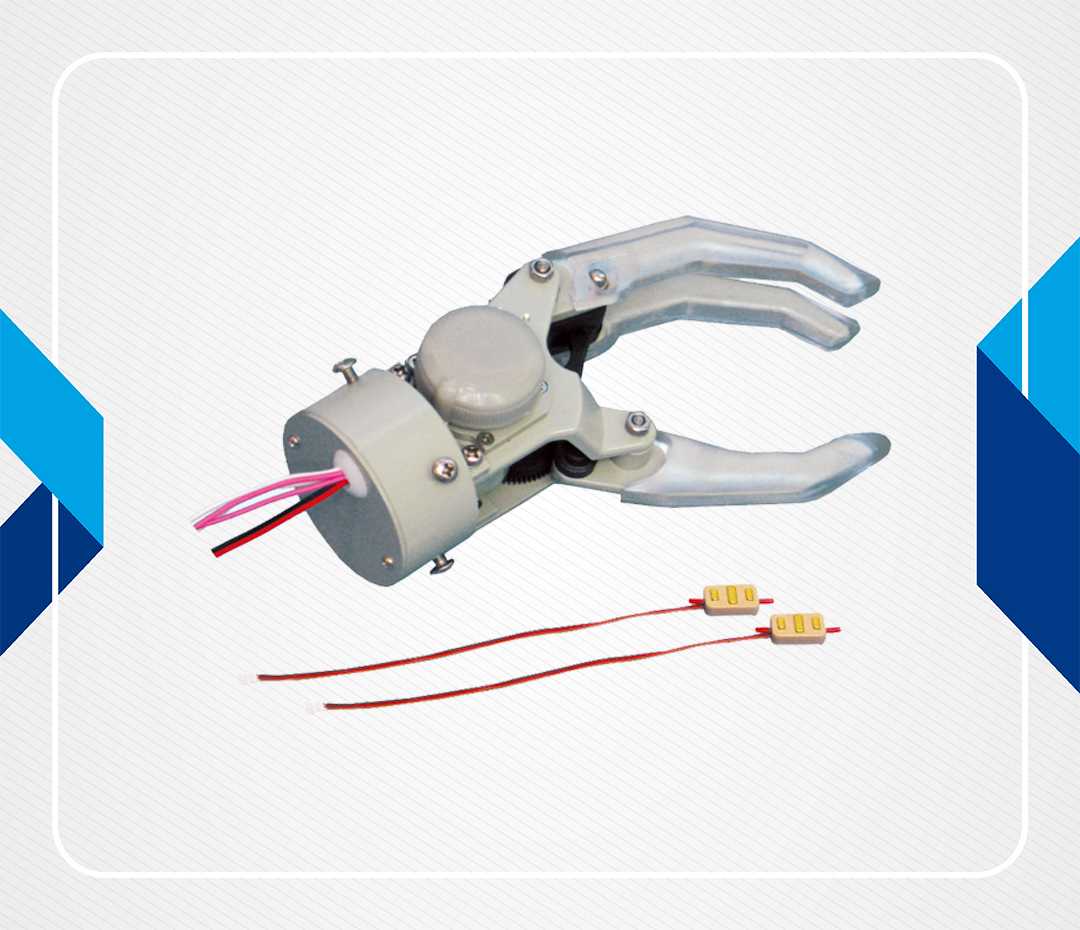
JB-SJQ 12-M Myoelectric arm prostheses with one degree of freedom and double channels(double electrodes)

JB-SKQ12B-M Switch control prostheses with one degree of freedom and double channel(double switch)